|
|||||||
| Construction Equipment If it digs, pushes, hauls dirt "off road" post it here. |
 |
|
|
Thread Tools | Display Modes |
|
#22
 02-14-2020, 02:09 PM
02-14-2020, 02:09 PM
|
|||
|
|||
|
Got started on the plates to hold the cylinder bases to the booms:
 Test fitting, needs a little trimming on the mating surfaces and some sanding on the top curves...  These will get bolted to the booms, then will get started on the pivots. 
|
|
#24
02-15-2020, 06:03 AM
|
|||
|
|||
|
Your making great progress on the booms ! Have you got plans for the undercarriage yet?
Keep up the good work
|
|
#25
02-15-2020, 03:35 PM
|
|||
|
|||
|
Quote:
I've got a slip ring to get the wires down to motors underneath, plan on having a pair of gearmotors to run the tracks. To start with, will use some metal tracks and sprockets that I got from an RC tank that are the right general size, and see how it all works before I take the time to make my own tracks (have done them for other models, a LOT of work!).
|
|
#26
02-16-2020, 11:05 AM
|
|||
|
|||
|
Got the plates on that hold the cylinders, next will start on the pivot bearings and rods at the joint. Then can start on getting the motor into the boom and give it a real test!
Here it is propped up next to the die cast model I am scaling from: 
|
|
#27
02-17-2020, 04:03 AM
|
|||
|
|||
|
Coming along very nicely! Your making rapid progress too
|
|
#28
02-20-2020, 02:38 PM
|
|||
|
|||
|
Been away from the model for a few days, this afternoon made and installed the pivot bearings/rod to connect the booms together. Nice to see some parts attached and moving! A couple small fasteners, then I can work out the motor mount inside the lower boom to power the cylinder. Actually, that brings up a question - what are the proper terms for the two booms? Lower/Upper, Inner/Outer, Fred/Ethel?? Must be a name for them...

|
|
#29
02-20-2020, 05:35 PM
|
|||
|
|||
|
Crueby:
The curved part is oddly enough called the "boom", the other is called either the "bucket arm" or the "stick". There is sometimes a "thumb" that the bucket can pinch against to pick something up, like your thumb and fore-finger. I have seen REALLY good operators that can pick up a wine bottle and pour a glass of wine with an excavator - and hardly spill any. This thumb can either be fixed, usually at about 90° to the stick which restricts bucket rotation, or it can be hydraulically operated to allow almost normal bucket rotation. Don
|
|
#31
02-20-2020, 09:59 PM
|
||||
|
||||
|
Those look really sweet. Glad to see you're even doing bushings. Keep up the progress!
I usually hear the arm parts called 'boom' , 'stick' , 'bucket'. I think naming is a carry-over from the design of the cable machines. If you'd rather lower your Fred to get more reach with your Ethel to take a scoop, i'm not going to argue, it's your machine.
__________________
What do ya mean "Cars are neither Trucks or Construction"? It's still scale, and i play fairly well with others, most of the time...
|
|
#32
02-20-2020, 10:08 PM
|
|||
|
|||
|
Quote:

|
|
#33
02-24-2020, 05:00 PM
|
|||
|
|||
|
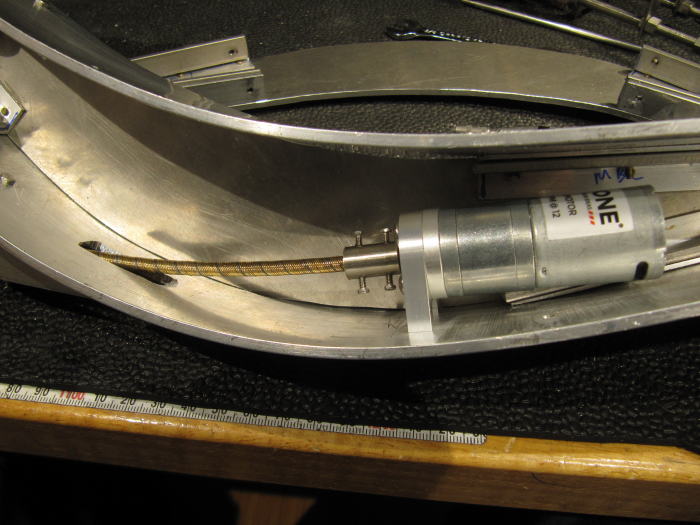
Back on the excavator today - I already had some Octura flex cable that I considered for use to connect the gearmotors to the cylinders, but it was too thin and twisted up under load. So, got hold of some of the thicker version, at .187" diameter, That is able to take a much higher force without twisting in either direction, and is still flexible enough for the gentle bends that I need to get out of it. This stuff is very handy, can transmit power without the noise of universal joints. I made up a set of ends for it, enough for all four cylinders, that have setscrews for the cable and the cylinder/motor shafts. Here is one set in place with one motor and cylinder:
 Here is about where it will sit, inside the boom and extending out to the bottom end of the cylinder:  Next I will get the motor mount holes drilled, and also need to make up the final shaft stubs for the clevises on the cylinder ends (been using some temp bits that happened to fit out of the scrab bin). Then I can wire it up to the speed control/radio and give it a real test. If all goes well, will get the other cylinders/motors installed.
|
|
#34
02-24-2020, 07:46 PM
|
|||
|
|||
|
And another bit done this evening - made the pivots for the cylinder ends, and milled the opening for the first flex shaft (to move the stick). The motor has been mounted, ready for some wiring to test it all. Here is a view inside the boom:
 and where the flex shaft comes out and connects to the cylinder end, to drive the leadscrew:  So, still need to wire up a ESC to the motor and hook up to a channel on the radio, and it will be ready for a trial run to see what kind of force it can put on the booms, and see how the travel time is. I've got some faster and slower gearmotors that I can switch to if needed to dial in the max speed and force on the cylinder. Hopefully it works well enough to continue on without having to change the leadscrew out.
|
|
#36
02-25-2020, 08:04 AM
|
|||
|
|||
|
Quote:
The leadscrew bases are held in with sealed ball bearing units, so that end is good. The screws themselves are polished steel with bronze followers, so they are designed to be able to run dry in the robotics world, but given the loads on the model I figured I would give them a thin coat of CopGraf for good measure. By pulling the crosspin on the tips of the cylinders, the piston can be unscrewed from the leadscrew and removed for access. Chris
|
|
| Currently Active Users Viewing This Thread: 1 (0 members and 1 guests) | |
|
|











 Linear Mode
Linear Mode

